1. Architecture Exploration and Hardware/Software Partitioning#
1.1. Required Files#
1.2. Goal#
The aim of this tutorial is to familiarize users with the SpaceStudio development environment to design, simulate and debug a system. You will be working with the dataflow sequence shown in Figure 1. The application is a JPEG Decoder.
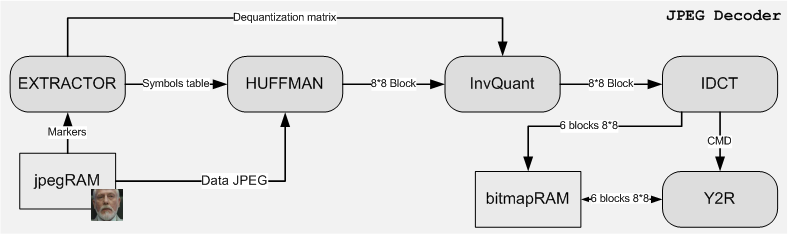
Figure 1.1 Data flow for JPEG Decoding#
1.3. Target Processors#
You will be working with a microblaze which is a 32-bit RISC processor that is proprietary to Xilinx. The microblaze connects to an AMBA AXI (data port) and LMB (data and instruction port) buses. The AMBA AXI serves to communicate with the peripherals and the other modules (e.g., over 2 to 3 cycles), while the LMB (Local Memory Bus) bus serves to read instructions and data directly from BRAM memory (e.g., in 1 cycle). Finally, you will see how a single task (module) runs on one or several processors, perhaps with the initial RTOS (µC/OS II) replaced by a bare-metal pseudo OS, to see how the application can be accelerated.
1.4. A few remarks before starting#
This tutorial focuses on using SpaceStudio technology for architectural exploration. The hardware/software co-synthesis for implementation on FPGA (e.g., Xilinx) conducted by SpaceStudio’s Architecture Implementation feature does not play a part in this tutorial.
All of the modules for the JPEG application have been pre-characterized for timing (computation timing budget) using a high-level synthesis (HLS) tool named Vitis HLS from Xilinx. Thus, when one of these modules is mapped to hardware, SpaceStudio activates the timing models derived from that characterization. When the module is mapped to software, SpaceStudio automatically deactivates the timing annotations, since the execution time is then determined by the processor on which the module runs.
Note
In SpaceStudio, the computation timing budget is modeled by the hw_compute_latency() statement
It is possible that when you try an initial solution using multiple processors (e.g., sections 4.8), the speed-up versus a uniprocessor solution is smaller than expected. That is simply because the achievable speed-up is limited by the algorithm’s sequential fraction, and by communication and synchronization delays between processors. To achieve higher speedups, it might be necessary to make modifications to the algorithm to take further advantage of parallel computation, which this tutorial does not do.
1.5. Architecture editor#
The principal view of SpaceStudio is the Architecture editor. This editor is a block design graphical interface. The Architecture editor is completely interactive: it is therefore possible to view the system, the connections and quickly configure the boxes as required. In addition, it offers more flexibility on architectural choices (i.e., connect a master interface to a free high-speed interface of the Zynq UltraScale+). This editor is familiar to system designers since it shares the same principal of downstream EDA tools (i.e., MathWorks Simulink, Xilinx Vivado, etc).
Moreover, several diagram can be open. This enables system designer to work on an architecture while another is building. The last active diagram is associated with the quick button in the toolbar.
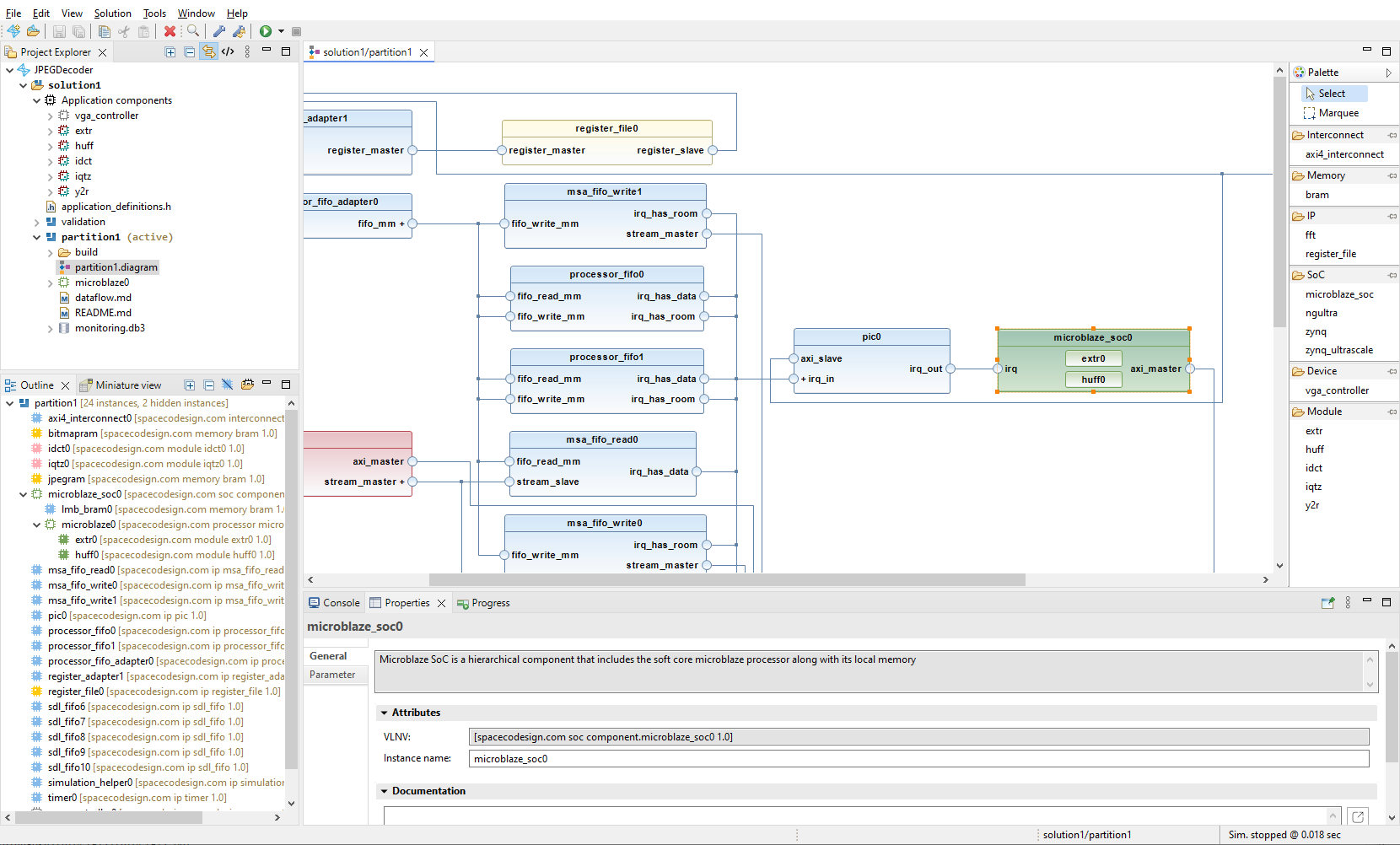
Figure 1.2 SpaceStudio#
1.5.1. Color scheme#
Blocks in the SpaceStudio diagram are colored according to their type, as follows:
Color |
Description |
Example |
|---|---|---|
Red |
Module mapped to hardware |
|
Green |
Processor or module mapped to software |
|
Gray |
User-defined device |
|
Blue |
Component instance added automatically by SpaceStudio |
|
Yellow |
Component instance added manually by the user that is neither an application component or a processor |
|
1.5.2. Action on double-click#
Double-clicking on component instance will perform an action depending on the type of component instance:
For application component instance, it will open the related .cpp file editor.
For hierarchical component instance, it will expand/collapse the component instance
For component instance with several ports of the same kind, it will expand/collapse all ports.
1.6. JPEG Decoder#
To get started, you must first obtain a copy of the reference (initial) project. Once you have obtained the reference project, expand the zip file in a directory on a path that contains only unaccented characters without spaces. This directory will be denoted by the token %PROJECT_ROOT%.
To open the project, double-click the file JPEGDecoder.spacestudio from %PROJECT_ROOT%.
1.6.1. Functional specification#
In SpaceStudio, you can create two types of design specifications: 1) functional specification (algorithm) and 2) system specification (architecture details).
The main objective of functional specification is to validate the functionality of the algorithm (does the algorithm fulfil the intended work?).
An architecture is an assembly of modules (i.e., pieces of C/C++ code) where lies an algorithm previously partitioned and library components (busses, memory, etc.) which connect these blocks together.
A functional specification is an architecture where all modules are mapped in hardware. SpaceStudio provides all the interconnects so the designers focus on the algorithm and architecture sizing.
To create an architecture:
Click on Solution
In the dropdown menu, click on New Architecture…
Enter
validationfor the name of the architecture and then click on OK
When a new architecture is created, the diagram opens. The diagram editor is the centerpiece of SpaceStudio and is used to instanciate/remove, configure instances and perform hardware/software mapping.
To configure the architecture:
From the newly opened diagram, uses the right pane to instanciate the following components :
extr,huff,idct,iqtz,y2randvga_controller(i.e., application)register_file
Click on the
vga_controller, go at the bottom, click on Properties tab and Parameter tab. Then, assign an addressable range of 1MB (rather than 4KB)Also add 2
braminstances with the following properties (you will rename by clicking on Properties tab and on General tab, and by renaming in Instance_name):Instance
Memory size
jpegram1MB
bitmapram1MB
Preload the
jpegrammemory with a initial jpeg image. For the Memory initialization, click on Browse… and navigate to the folder%PROJECT_ROOT%\importand select the filejpeg_init.json. Click OK.
To execute this architecture, clicking on the run icon  from the toolbar will launch the simulation.
from the toolbar will launch the simulation.
Note
You may see an error message about a failed up-to-date check. This just means that the current output doesn’t match the latest version of the architecture. This is expected because the architecture hasn’t been built yet. To continue compiling, simply answer Yes.
To determine that the simulation is running correctly, you can check the progress messages printed in the console window, at the bottom of the GUI. The VGAController component will save the decoded JPEG inside the project directory, this is used to validate the decoded image. If the verbose parameter of the VGAController is set to true, every decoded tile (MCU) will be saved independantly in the decoder_frames folder. The progress message output should appear like the following:
-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=
Space Codesign Systems Inc.
Copyright 2005-2024. All rights reserved
https://www.spacecodesign.com
SpaceStudio 4.4.0
-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=
Starting simulation.
EXTR:JPEG1
Info: /OSCI/SystemC: Simulation stopped by user.
Simulation has ended @0.00073449 s
Simulation wall clock time: 0 seconds.
If you don’t see these messages, be sure to check that you had correctly followed all of the previous steps.
Note that Simulation has ended indicates the execution time for processing on image of 128 x 128 pixels, taking 0.00073449 sec. In other words, it would be possible to continuously 1361 images per second.
As for simulation wall clock time, it indicates the real-world duration of the simulation, to the second.
1.6.2. System specification (architecture details)#
In this section, we will create an architecture that includes a processor. You can refine the solution for a more accurate timed design and test your application on various architectures.
Click on Solution
In the dropdown menu, click on New Architecture…
We will reuse the previous architecture to jumpstart the new architecture.
Type
partition1as the architecture nameCheck the option Based on existing architecture
Choose
validationas the existing architecture
Click on OK
1.6.3. Addition of a microblaze and moving extr and huff from hardware to software#
The role of extr is to read the header of the JPEG image. Since the format may evolve, extr may be updated in the future. Also, as huff is tightly connected to extr (Figure 1), we will assign extr and huff to the processor (SW partition), while the rest will stay in hardware. Therefore, using the architecture partition1, follow these instructions:
Open the
partition1architecture diagramFrom the Project Explorer, expand the
partition1Double-click on the diagram named
partition1.diagramto open it
From the diagram :
From the right pane, instanciate the
microblaze_soc(by dragging-and-dropping)Increase the memory size of the microblaze for the software code to 128KB by clicking on the Properties tab and Parameter tab, and by modifying the Memory_size
Move the module instances
huffandextr(from hardware) to themicroblaze_soc(to software). This is achieved by dragging the module instance design block to themicroblaze_socdesign block.
To execute this architecture, clicking on the run icon from the toolbar will launch the simulation.
Note
SpaceStudio examines the application’s code to figure out how it needs to communicate. It then adjusts the platform’s hardware (adding, removing, or changing parts) to make sure the application works as intended.
It should take around 0.0186641 seconds to decode one image (Simulation has ended), or about 54 images decoded per second continuously.
Repeat this section’s steps, but this time move huff to hardware and change the operating system of the microblaze from uC/OS-II to Baremetal. You should see a significant acceleration in decoding. Why?
1.6.4. Monitoring of a system architecture with 1 microblaze#
1.6.4.1. Running monitoring#
Next, you must execute the simulation with the monitoring feature enabled:
Click the arrow next to the run icon
from the toolbarFrom the dropdown, click the
 icon
icon
Important
It is important to let the simulation finish on its own to ensure that it saves the data created for performance profiling. Once the simulation finishes, a monitoring.db3 node will be added to your Project Explorer.
1.6.4.2. Viewing processor load#
Now that the monitoring database file is generated, manually expand monitoring.db3 > Processor load > microblaze0. Now double-click the core0 node to open the monitoring results for the Microblaze’s core 0. An example output is represented in Figure 1.3.
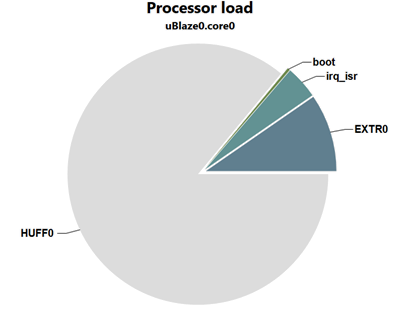
Figure 1.3 Task Profile for microblaze0#
Hovering any of the pie chart’s slices will reveal a textbox displaying more precisely the proportion of execution time of that slice.
1.6.5. Hardware/Software Co-debugging#
In this section, we will perform hardware/software co-debugging. During this exercise, we will examine hardware/software communications - in this case, communication between the huff and iqtz modules. For this section, we will continue working with the architecture partition1 created in the previous section. (If that architecture does not exist, you will need to create it using the previous instructions.)
Before starting, make sure the partition1 diagram is opened.
Next, you must execute the simulation with the debug feature enabled:
Click the arrow next to the
iconFrom the dropdown, click the
 icon
icon
Once you have launched the co-simulation, a pop-up window titled Confirm Perspective Switch will appear, asking for approval to change the window layout on SpaceStudio. Select Switch to change to the debugging perspective.
Note: SpaceStudio generates an optimized version of modules which include low-level drivers for communication with the system. It is the generated files that are compiled and suitable for debugging. For instance, SpaceStudio is not debugging the iqtz.cpp file but a compiled file that will be typically named iqtz0.cpp. These generated source codes are located under the build node in the project explorer. Editing the generated files will not change the original file.
We will focus on a blocking message-passing communication between modules huff and iqtz, when the huff module writes a block of data to iqtz.
At the start, the debugger perspective only shows the hardware portion of your design architecture as shown in Figure 1.5. At this point, you can only insert breakpoint into a hardware-mapped module or user-defined device.
To insert a breakpoint into the iqtz module:
From the Project Explorer, navigate in partition1 -> build -> module-> iqtz0
Double-click the
iqtz0.cppto open it.Insert a breakpoint to the
ModuleReadinstruction near the line 134 (as shown in Figure 1.4), with a double left mouse-click. You may need to activate line numbering in the editor window ; do a right-click on the grey space left of the editor and select Preferences, then search for Show line numbers, click the appropriate checkbox, apply and close.
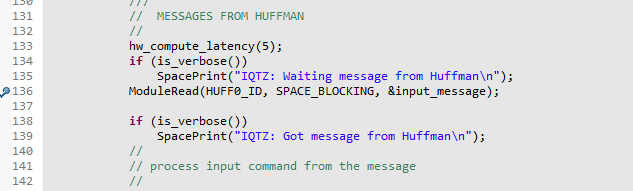
Figure 1.4 iqtz0 breakpoint#
Next, start the hardware simulation by clicking on the  button, i.e., Resume (F8). All the components will activate including the MicroBlaze processor model, which launches the processing of the software modules.
button, i.e., Resume (F8). All the components will activate including the MicroBlaze processor model, which launches the processing of the software modules.
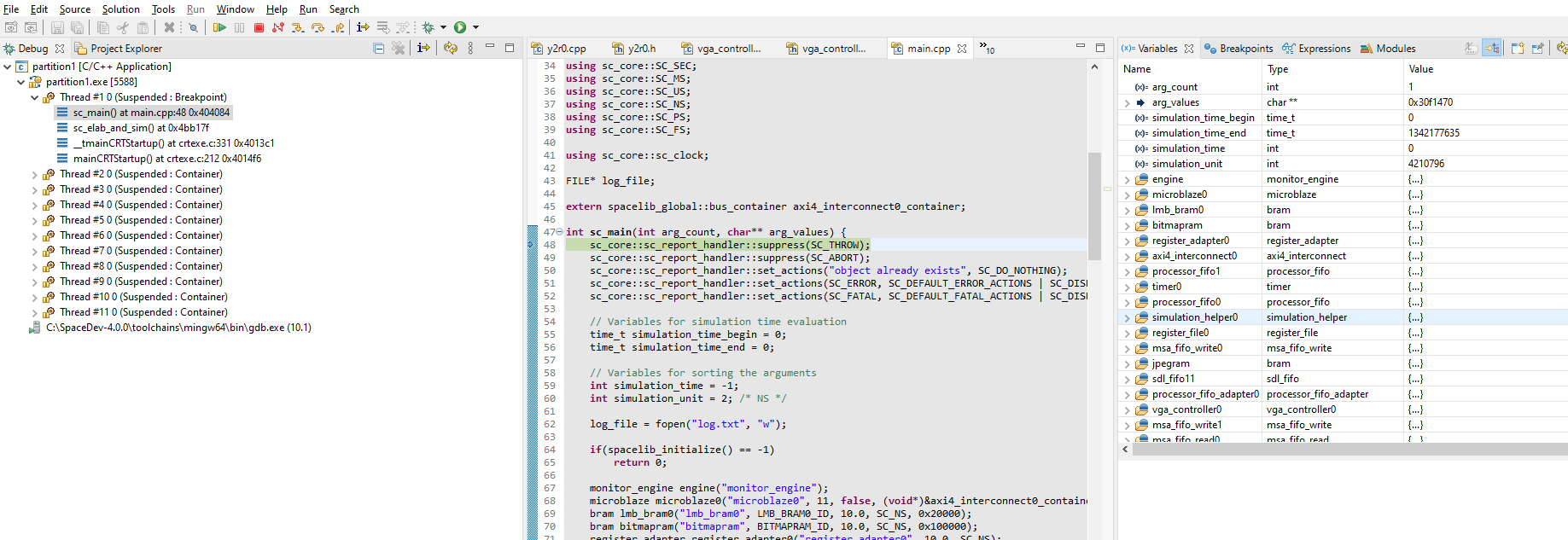
Figure 1.5 Hardware breakpoint hit#
The debug console window will change, as seen in Figure 1.7, when the GDB server appears for the software execution.
At this point, you can insert breakpoint into a software-mapped module.
To insert a breakpoint into the huff module:
1. From the Project Explorer, navigate in partition1 -> microblaze0 -> build -> module -> huff0
1. Double-click the huff0.cpp to open it.
1. Insert a breakpoint to the ModuleWrite instruction near the line 134 (as shown in Figure 1.4), with a double left mouse-click. You may need to activate line numbering in the editor window ; do a right-click on the grey space left of the editor and select Preferences, then search for Show line numbers, click the appropriate checkbox, apply and close.
Select the tab for the file huff0.cpp and then insert a breakpoint near line 352 with a double left mouse-click, at the ModuleWrite line (as shown in Figure 1.6). This breakpoint will be activated when the software execution reaches that instruction.
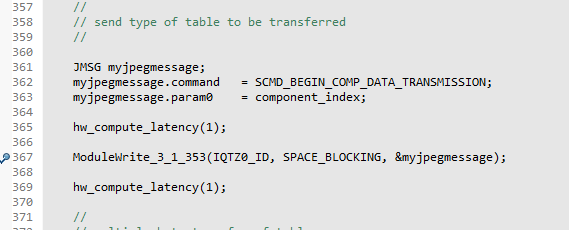
Figure 1.6 huff0 breakpoint#
Right now, there are 1 hardware breakpoint and 1 software breakpoint for the matching blocking communication. We thus should expect a kind of “ping pong” mechanism when stepping through the debugging session.
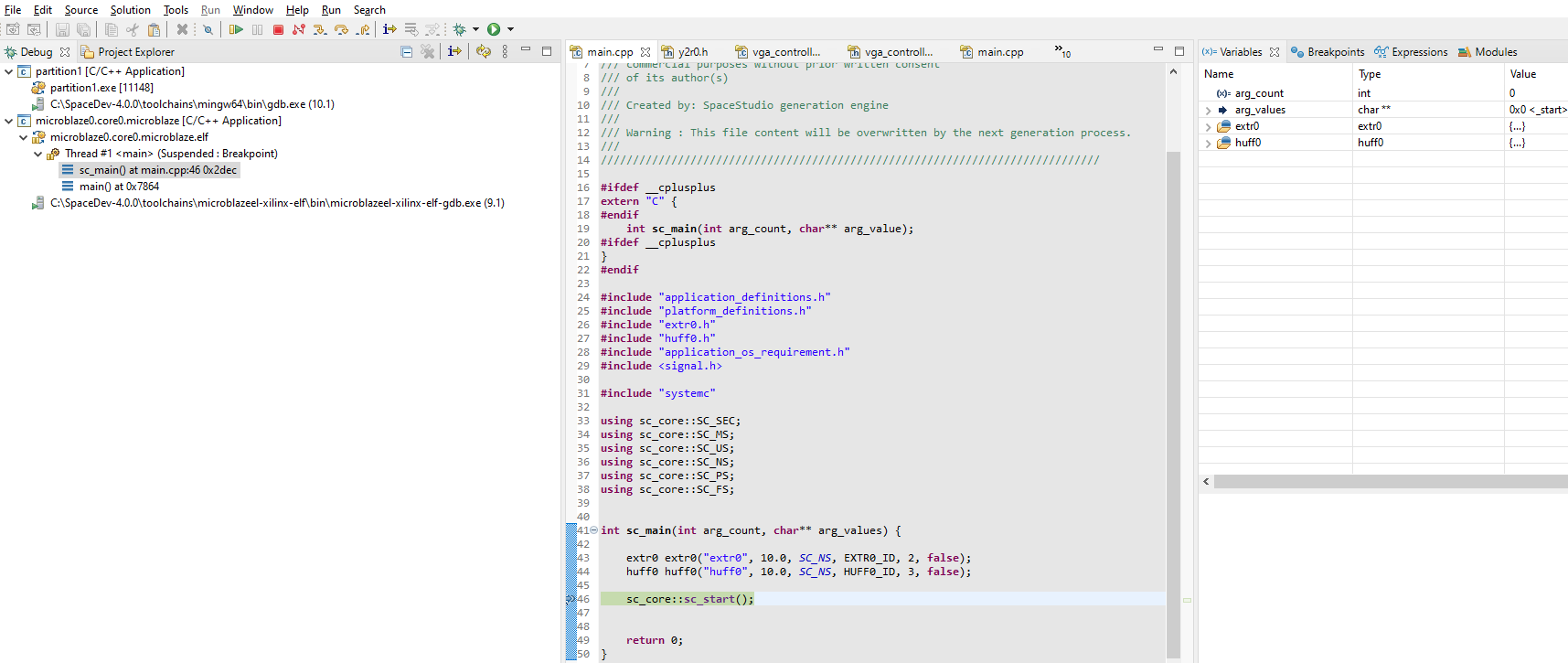
Figure 1.7 Software breakpoint hit#
At this point, the hardware debugger is running while the software debugger is suspended. To resume the software debugger, click on the button to resume the whole simulation. The control of the simulation should then pass to the hardware debug window.
It is very important to understand that one window is active at a time (software or hardware). You can thus advance in the simulation (e.g., step, continue or next) one window at a time (e.g., hardware) while the other is blocked (e.g., software). Whenever you arrive at a communication by ModuleRead (or ModuleWrite), the simulation may change windows. For example, if iqtz performs a blocking ModuleRead for data not yet received from huff, it will wait until a matching ModuleWrite by huff is completed before continuing. As a result, if iqtz is executing in hardware and it becomes blocked by a blocking ModuleRead, the hardware window becomes blocked as the software window takes over to carry out the communication (i.e., the transfer of data).
At this moment, your simulation should be at iqtz breakpoint (hardware window). Click on the button and you should see control pass to _huff_ (software window). Do it again , and you should arrive at huff breakpoint. Then click again on and you will return to iqtz breakpoint (hardware window). And so on.
To summarize, each time that the thread huff executes (as a task on µC/OS II) the software module sets itself up to send data to the hardware module. By clicking on the button, that has the effect of unblocking the hardware module once it receives its data. You can then observe that the communication is blocking and that the execution of ModuleWrite has the effect of unblocking the module that carries out reading the data using ModuleRead.
This example illustrates how hardware/software co-debugging can be used to investigate the interactions between hardware and software modules. In the embedded systems industry, this approach is often called hardware/software co-simulation. To exit the simulation, you can remove all breakpoints and resume the simulation, or you can simply stop the debugging session by clicking on  .
.